

センシングサイエンティストのもってぃです。
先月は3回秋葉原に行ってました。
回路基板、もっとたくさんAmazon Prime Nowで取り扱ってほしいです。
センシングチーム発足
最近もってぃと一緒に働いて頂ける仲間が1台が増えました。
他に既にセンサ3個もありますので、そろそろチーム化しようと思います。
チーム名候補は
・センシングチーム
・チーム・センシング
・チーム・もってぃ
とりあえず、わかりやすく
「センシングチーム」
と名乗ってみます。
ちなみに現在の参画メンバーは
・もってぃ
・温度センサ
・加速度センサ
・一眼レフカメラ
・ロボットアーム
えっ?
人間は一人しかいないだろですって?
フフフフ。
そういう時代に入ってきたんですよー。
6月より参画!ロボットアームさん
今回は、6月に参画したメンバーを紹介します。
ロボットアームさん
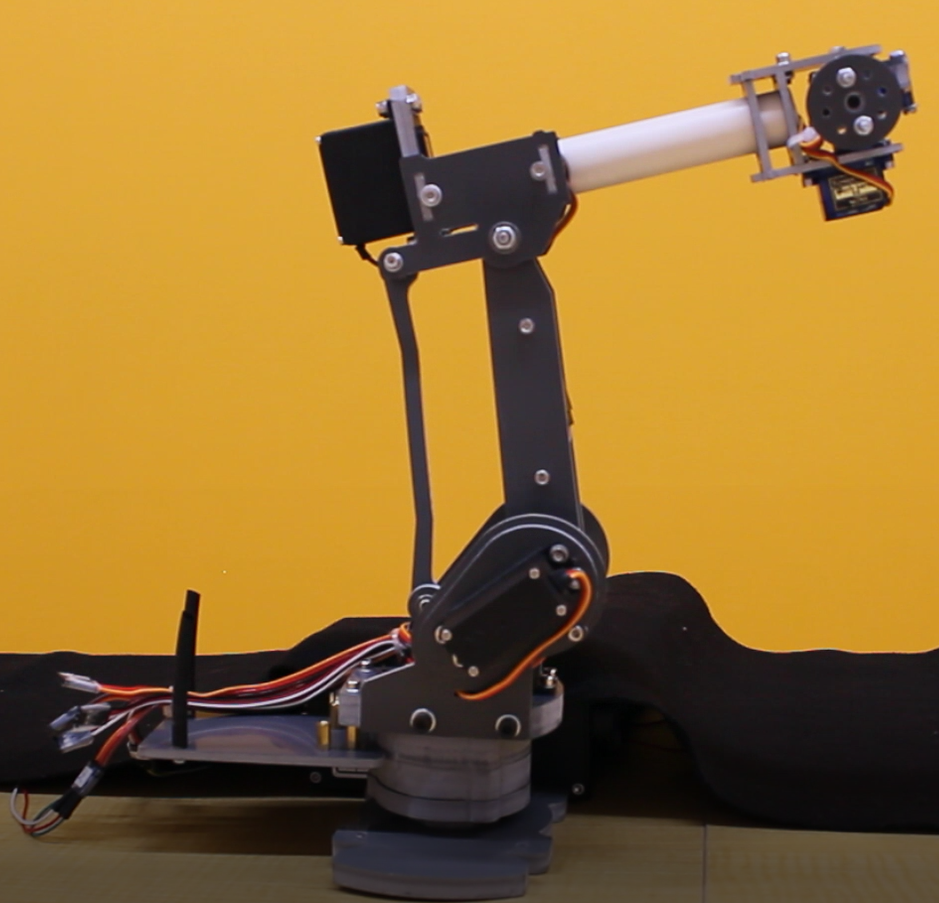
かっこいいでしょ?
ロボットアームさんの初仕事は
「第29回 設計・製造ソリューション展(DMS)」で3日連続休みなく動き続けること。
MONOistさんの記事では、なんと写真の中心に写っており、
頑張って動いている様子がみてとれます。
ワォ♪
ついにロボットアームと人間が一緒に働く時代になったのです。
特に、センシングにはロボットさんの存在がかかせません。
おどろき~♪
ちなみに今日の業務の一コマ。
ロボットアームの基本はモータを駆動させること!
このロボットアームには6個のモータがついており、
このモータをくるくる回転させることにより関節が動き、
いろいろな運動を表現できます。
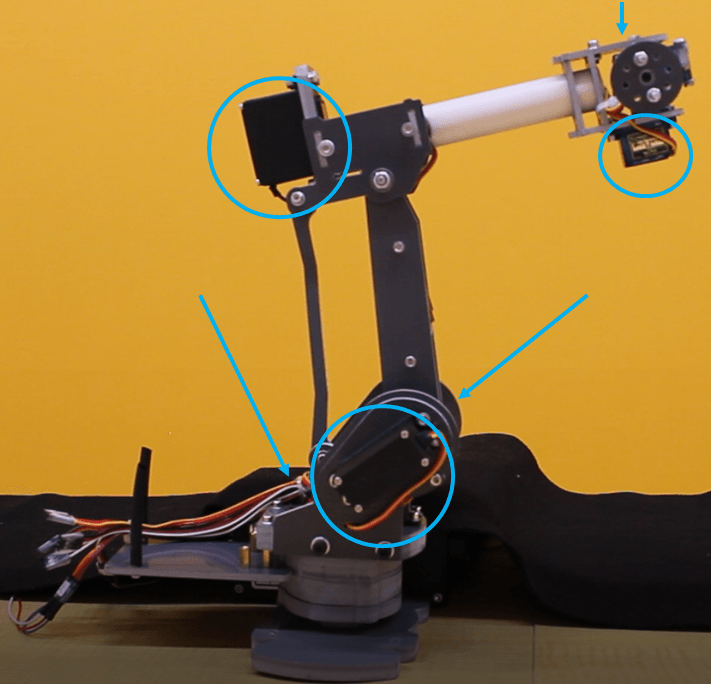
青色矢印、青丸はモータ位置。
モータってどうやって回転するのでしょうか?
ここでは、
「ブラシ付DCモータ」と呼ばれる種類のモータを
例にとって説明します。
その前に、
もっていの左手を使って、
みんな大好き「フレミングの左手の法則」
を復習しましょう。
フレミングの左手の法則とは、
電流、磁場(磁界)、力のそれぞれの方向の関係を現わす法則です。
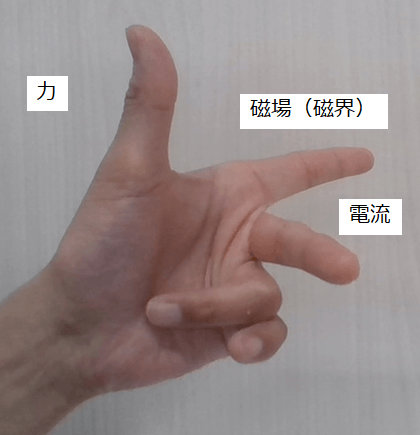
中指:電流の方向
人差し指:磁場(磁界)の方向
親指:力の方向
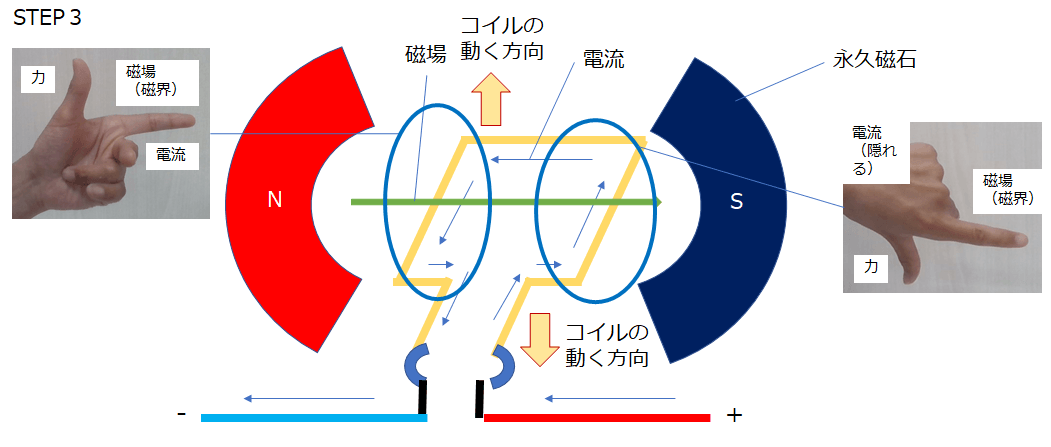
モータの構造は超簡単にすると、こんな感じ。
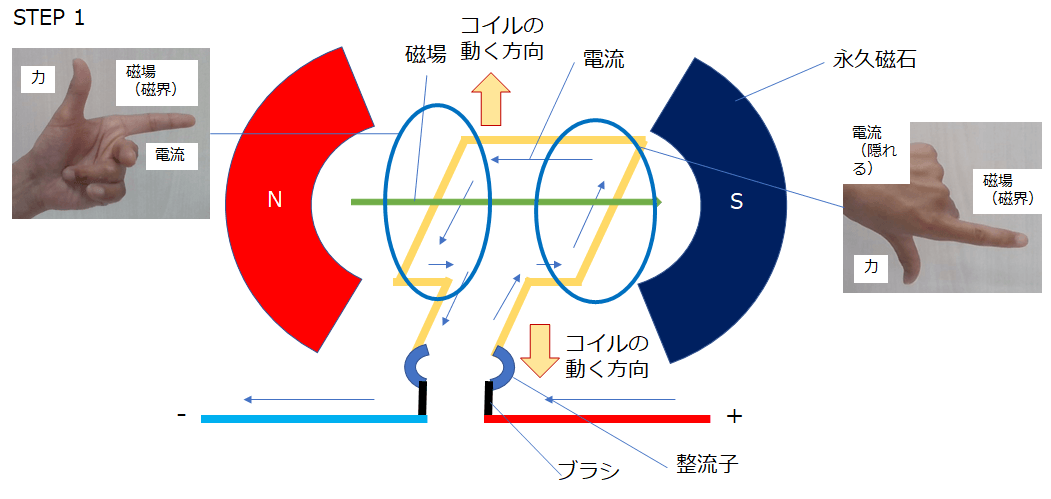
ブラシ、永久磁石、整流子、コイル
で構成されています。
整流子とブラシが接触していますので、
コイルに電流が流れます。
また、磁場(磁界)の向きはN→Sとなります。
このとき、
左半分のコイルにフレミングの法則を適用すると、力は上方向に、
右半分のコイルに適用すると、力は下方向に働くことがわかります。
つまり、コイルは時計回りに回転し始めます。
回転し始めると、整流子とブラシが接触しなくなりますが、
コイルはそのままのいきおいで回転します。
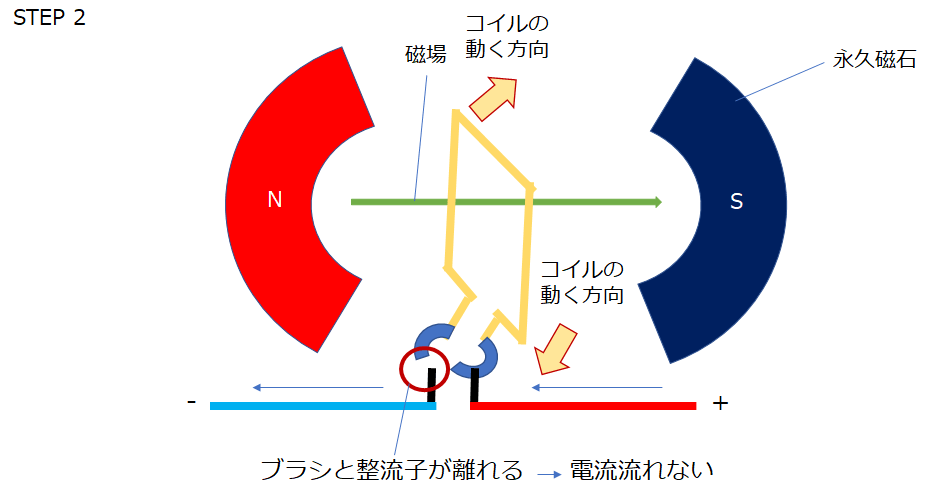
そのうち、整流子とブラシが接触し、コイルに電流が流れ、
先ほどと同じ仕組みで力が働き、
時計回りに回転するのです。
こんな感じでコイルが回転することによりモータは回転します。
モータのしくみがわかったところで、
次回はモータを駆動し、ロボットアームさんを動かす方法を紹介します。
では。